|
| |
|
Introduction:
The objective of the competition was to develop a robot that could follow a
black line in a white background. This black path had some discontinuity and
abrupt turns.
Little Kambiz won the
first prize of
“Line Tracking” part,
Intelligent Mice Robotic Contest, IEEE Student Branch, University of Tabriz , 2001.
|
 |
| |
|
|
 |
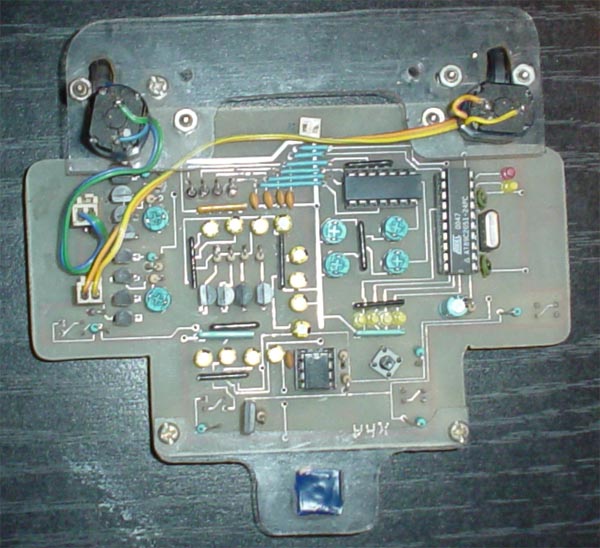
Robot Technical Feature:
What makes Little Kambiz truly exceptional
is its high speed, efficient and absolutely reliable controlling algorithm,
its small size and motor braking circuit.
Little Kambiz has four Infrared reflective
sensors attached to the front of the robot. Each sensor along with its
related circuitry provides a digital signal to microcontroller according to
the surface it is positioned above, that is, the output is high when it is
positioned over white, low output when it senses black line.
|
| |
|
|
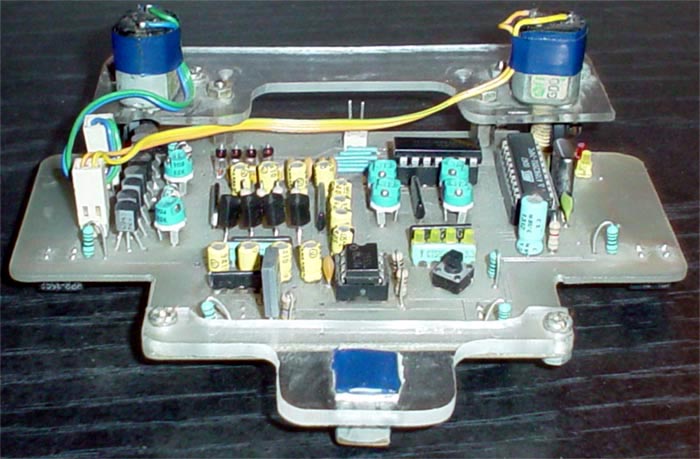
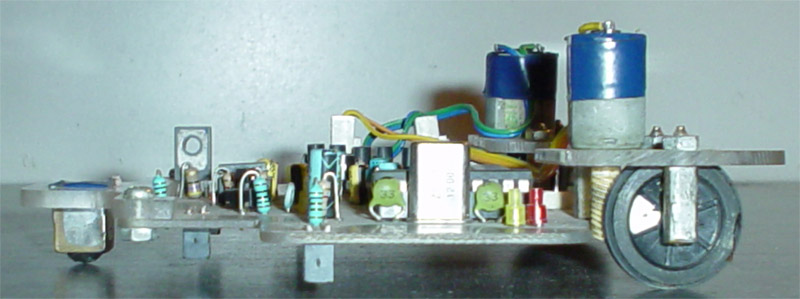
The robot has two driven wheels in the back
and the steering is based on differential motion, enables it to change the
direction very quickly. Besides, the motor braking system causes each wheel
to stop more quickly at the time when it is deviated from the line.
Following its reliable and revised
algorithm that was implemented in a 802051 microcontroller, Little Kambiz
almost never deviated from the line. Here is a brief overview of the
algorithm:
|
 |
| |
|
|
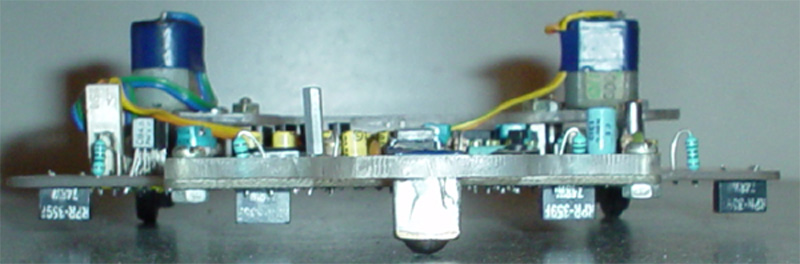
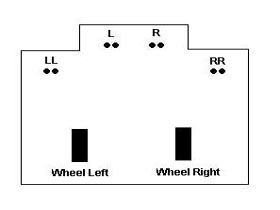
We put the robot on the ground so that the
line places between sensor R and L then controller commands the wheels to go
forward. As soon as one of the sensors (R or L) senses black, the related
wheel stop while other is moving forward, so the robot turn back to line. In
the case of discontinuity, sensors RR and LL play their roles to recognize
the discontinuity and compel the robot to return back according to
relatively more complex algorithm.
Summarized Little Kambiz Characteristics:
-
Absolutely reliable controlling algorithm
-
High speed
-
Wheel braking circuitry
-
Small dimensions (135mm*130mm)
-
3Khz modulation for Infrared sensors ,
diminishing the effect of power line 50Hz noise
-
Software debouncing method , preventing
transient responses of sensor status affects algorithm defectively
|
|
Members Involved: |
|
Hormoz
Kaykhanzadeh:
Little Kambiz was our
first robot that won the competition. His success persuaded us for further
achievement and led us to a precious confidence. As he always worked
correctly in a variety of black lines, we could take him everywhere with us
and show his capabilities to others. He became very well known even more
than our team. We were all called the father of Kambiz ;)
|
 |
| |
|
|
Farshad
Tajali:
|
 |
| |
|
|
Kaveh
Abhari:
|
 |
| |
|
|
Alireza Nakhai:
|
 |
|
|
|
|