|
Robot Technical Feature:
Generally he was
the modified version of Kambiz-Pour.
As
time was the most competing factor, we designed Kambiz-Javid in a way to
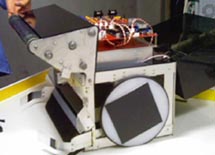
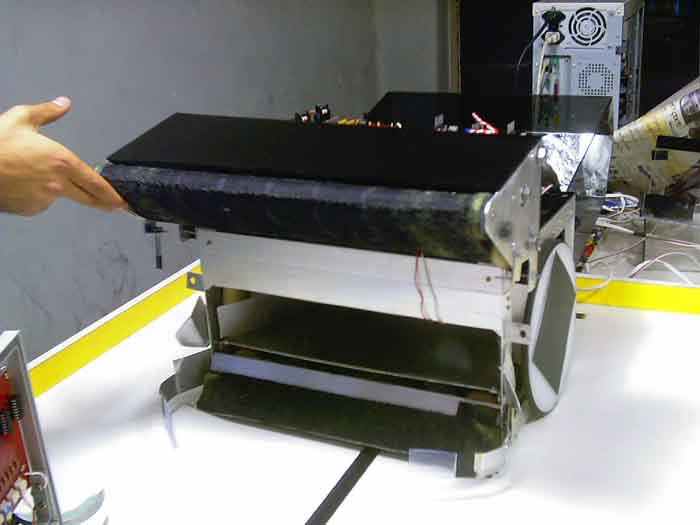
gather all balls by scanning the pitch just one time. He had one sweeper in
the front that grabbed every ball which placed in front of it. The
mechanical designed of sweeper was so precise and thoughtfully.
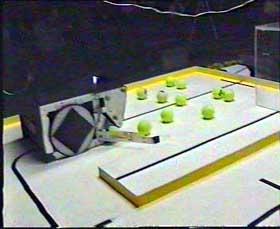
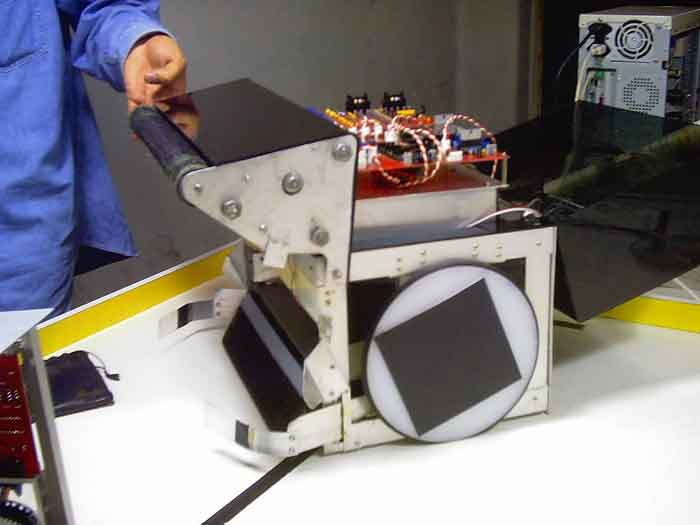
There were two
arms that opened to expand the scanning area and closed at the end of the
pitch to move every free ball to the front of the sweeper. So robots
gathered all the balls by one passing through the court. |