|
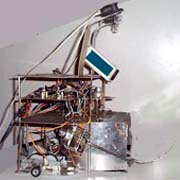
Using a
camera which was attached on the head of the robot, it recognized each
object according to its relative color.
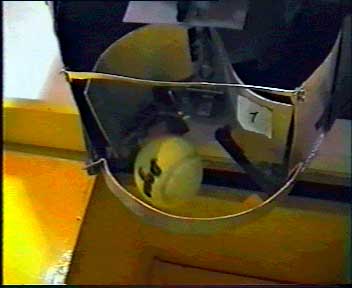
The
robot could fine his way by the same algorithm that Little Kambiz used.
It took a picture and found the optimum object to pick up, identifying its
identity and position. Then it went toward the object, picked it up and kept
it inside itself. |